 ЭЛЕКТРОННЫЕ УСТРОЙСТВА
ЭЛЕКТРОННЫЕ УСТРОЙСТВА
|
ЭЛЕКТРОННЫЕ УСТРОЙСТВА
|
|
|
|
|
Это не завершенное устройство
Что оно умеет - Передвигаться по комнате, случайно меняя направления или делая остановки и развороты, а иногда остановки с вилянием хвостом. Реагировать на препятствия и уходить от них, объезжать. Объезд препятствий реализован достаточно хитро, когда сбоку ИК датчик фиксирует препятствие, робот может (с вероятностью 50/50) повернуть в эту сторону голову, как бы смотрит, что же там мешает. Еще у робота меняется настроение, что индицируется цветом глаз и лыбой на роже: зеленые глаза и улыбка - добрый, красные глаза и грустный рот - злой. Настроение меняется в зависимости от того, что с роботом происходит. Изначально у робота хорошее настроение. В добром режиме он случайно выбирает действия, ехать веред, остановка, поворот, разворот и т.п., а также может на несколько секунд остановиться и повилять хвостом. Если роботу светить совсем в глаза фонариком, он начнет "психовать", отворачиваться от яркого света, крутить головой, если продолжать ему светить в глаза цвет глаз меняется на красный, робот "злиться" и начинает уже двигаться по другому алгоритму, с более частыми поворотами и остановками, без виляния хвостом, а может и вовсе застыть в "ступоре" на несколько десятков секунд.  Схема (нажмите на рисунок для увеличения) Схема робота показана на рисунке, основа микроконтроллер PIC16F877A, работающий на частоте 4МГц, этой частоты вполне достаточно, более высокая частота увеличивает энергопотребление и снижает устойчивость к помехам. А моторы - это сильный источник помех, гадости в цепи питания высыпают очень много. Питание робота может осуществляться как от одного NI-MH, так и от двух аккумуляторов напряжением 4,8 вольт. Когда используется 2 аккумулятора, цепи двигателей и цепи микросхем питаются раздельно, это очень хорошо фильтрует помехи. Можно использовать и общий аккумулятор, для этого нужно установить перемычку JUMPER и подключить батарею к любому из двух разъемов.
Голова - это коробочка от китайского блока питания, установлена на самодельном сервоприводе (редуктор с мотором, переделанный из разбитой китайской игрушки), умеющим поворачивать ее в прямом направлении и примерно на 30 градусов вправо и влево. Обратная связь осуществляется касанием подвижной пружинки и неподвижных штырьков. На голове установлено два двухцветных светодиода (глаза), фотодатчик (нос), несколько маленьких светодиодов (рот) - получилась такая себе рожица  Ходовая часть это классическое трехколесное шасси. Впереди два ведущих колеса - насаженных на самодельные 4-х ступенчатые редукторы с моторами от игрушек. Редукторы изготовлены из текстолитовых пластин, пластиковых шестеренок и стальных проволочных осей, передаточное число около 105. Сзади установлено одно опорное колесо от советского пылесоса типа "Буран". Это колесо установлено на поворотной стойке. Н-мосты управления двигателями - транзисторные (их запросто можно заменить и микросхемами, подробнее о H-мостах тут). 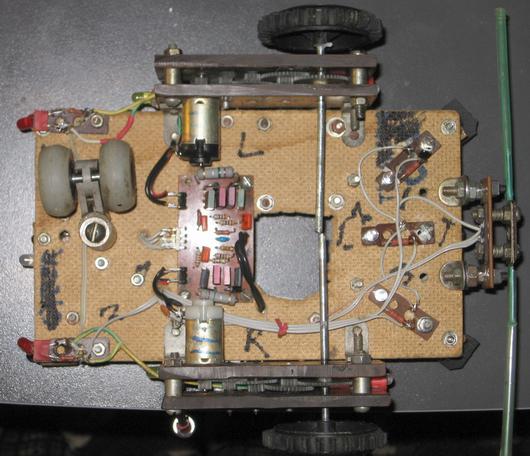
Световые элементы: чисто декоративные сведодиодные украшения. 
Дополнительно установлен пьезоизлучатель звука со встроенным генератором (пищатель). Он издает звуки, выдает сообщения телеграфной азбукой "Морзе". Сзади робота установлен декоративный хвост связанный тягой с редуктором привода, который позволяет роботу вилять хвостиком. А вся остальная электроника прекрыта декоративной "шерстью" (взятой из женской резинки для волос, той же, что и для волос на голове робота) - животное все таки 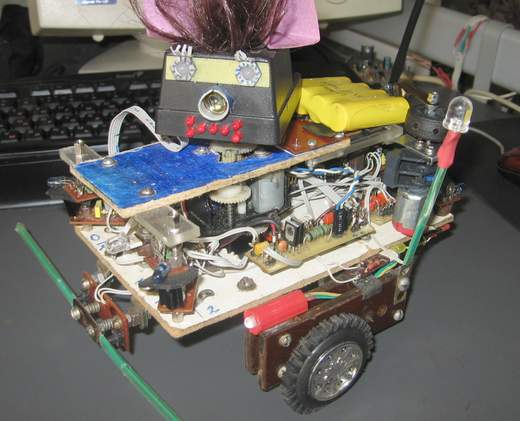 В заключение о конструкции - многие платы соеденены между собой шлефовыми проводами, кроме того, съемные элементы, такие как голова, аккумулятор, выключатель питания, сервопривод и другие, которые расположенны не на основном ярусе робота снабжены разъемами, для удобства доступа к ним. Это очень облегчает сборку и отладку робота.  Это статья больше ознакомительная. Ввиду того, что конструкция оказалась механически не надежной, реализация его была прекращена. Вобщем развалился он раньше, чем я его довел до ума. Поэтому, никаких программ и прошивок для этого робота у меня нет и не будет. Дата публикации: 22.11.2008 |
|
|
© идея и дизайн MAMED Любое использование материалов сайта без согласования с автором з а п р е щ е н о ! |
 Это попытка создания машины имитирующей более-менее "умное" поведение. В качестве мозга использован микроконтроллер PIC16F877A. Робот умеет объезжать препятствия, двигаться на свет и от него, шевелить головой и хвостом. Еще одно его достоинство, это то, что он сделан практически полностью из подручных материалов и хлама, поэтому он получился очень дешевый по деньгам, потратиться пришлось только на некоторые микросхемы и др.радиодетали.
Это попытка создания машины имитирующей более-менее "умное" поведение. В качестве мозга использован микроконтроллер PIC16F877A. Робот умеет объезжать препятствия, двигаться на свет и от него, шевелить головой и хвостом. Еще одно его достоинство, это то, что он сделан практически полностью из подручных материалов и хлама, поэтому он получился очень дешевый по деньгам, потратиться пришлось только на некоторые микросхемы и др.радиодетали.